>> P.1142
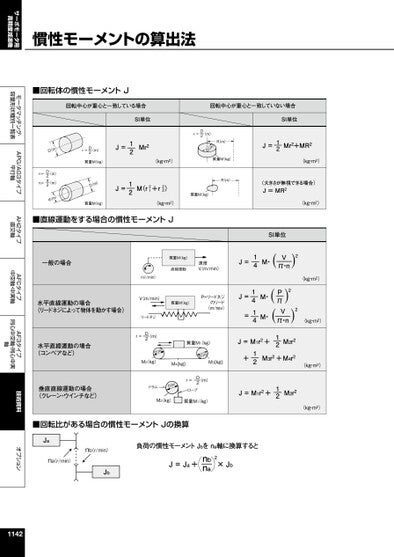
モータマッチング・容量形状種別一覧表APG/AG3タイプ平行軸AH2タイプ直交軸AFCタイプ中空軸・中実軸AF3タイプ同心中空軸・同心中実軸技術資料オプションサーボモータ用高精度減速機SI単位(kg・m2)J=Mr2+MR212(大きさが無視できる場合)J=MR2(kg・m2)R(m))mD(質量M(kg)R(m)(m)D2r=質量M(kg)(kg・m2)SI単位J=Mr2122221J=M(r+r)12質量M(kg)(m)D2r=)mD(質量M(kg)(kg・m2))mD()m(d(m)(m)D2d2r1=r2=慣性モーメントの算出法■回転体の慣性モーメントJ回転中心が重心と一致している場合回転中心が重心と一致していない場合(kg・m2)(kg・m2)SI単位2・nVπM・22Pπ・nVπM・M・141414J=J==12J=M1r2+M2r2(kg・m2)+M3r2+M4r212(kg・m2)12J=M1r2+M2r2一般の場合質量M(kg)直線運動速度V(m/min)nr/min)水平直線運動の場合(リードネジによって物体を動かす場合)V(m/min)質量M(kg)P=リードネジのリード(m/rev)質量M1(kg)D()mM3[kg]M2(kg)M4[kg])mD(リードネジ(m)D2r=M2(kg)質量M1(kg)(m)D2r=ロープドラム)mD(水平直線運動の場合(コンベアなど)垂直直線運動の場合(クレーン・ウインチなど)■回転比がある場合の慣性モーメントJの換算■直線運動をする場合の慣性モーメントJ負荷の慣性モーメントJbをna軸に換算するとJ=Ja+×Jbnbna2Janar/min)nbr/min)Jb1142
 | <
| <  |
|  > |
> |  >>
>>