>> P.800
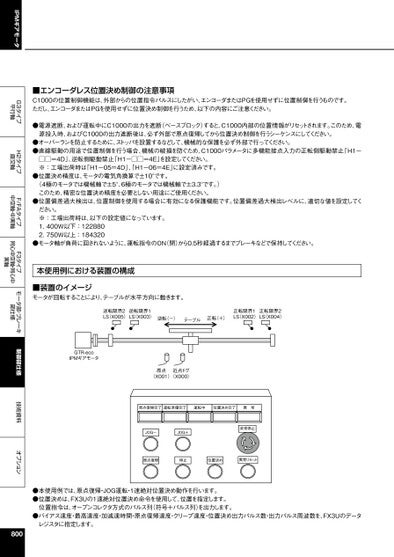
IPMギアモータG3タイプ平行軸H2タイプ直交軸F/FAタイプ中空軸・中実軸F3タイプ同心中空軸・同心中実軸モータ部・ブレーキ部仕様制御部仕様技術資料オプション■エンコーダレス位置決め制御の注意事項C1000の位置制御機能は、外部からの位置指令パルスにしたがい、エンコーダまたはPGを使用せずに位置制御を行うものです。ただし、エンコーダまたはPGを使用せずに位置決め制御を行うため、以下の内容にご注意ください。●電源遮断、および運転中にC1000の出力を遮断(ベースブロック)すると、C1000内部の位置情報がリセットされます。このため、電源投入時、およびC1000の出力遮断後は、必ず外部で原点復帰してから位置決め制御を行うシーケンスにしてください。●オーバーランを防止するために、ストッパを設置するなどして、機械的な保護を必ず外部で行ってください。●直線駆動の用途で位置制御を行う場合、機械の破損を防ぐため、C1000パラメータに多機能接点入力の正転側駆動禁止「H1-□□=4D」、逆転側駆動禁止「H1-□□=4E」を設定してください。※:工場出荷時は「H1-05=4D」、H1-06=4E」に設定済みです。●位置決め精度は、モータの電気角換算で±10°です。(4極のモータでは機械軸で±5°、6極のモータでは機械軸で±3.3°です。)このため、精密な位置決め精度を必要としない用途にご使用ください。●位置偏差過大検出は、位置制御を使用する場合に有効になる保護機能です。位置偏差過大検出レベルに、適切な値を設定してください。※:工場出荷時は、以下の設定値になっています。1.400W以下:1228802.750W以上:184320●モータ軸が負荷に回されないように、運転指令のON(閉)から0.5秒経過するまでブレーキなどで保持してください。本使用例における装置の構成■装置のイメージモータが回転することにより、テーブルが水平方向に動きます。逆転限界2LS(X005)逆転限界1LS(X003)逆転(-)テーブル正転(+)正転限界1LS(X002)正転限界2LS(X004)GTR-coIPMギアモータ原点近点ドグ(X001)(X000)原点復帰完了運転準備完了運転中位置決め完了異常JOG-JOG+非常停止原点復帰停止位置決め異常リセット●本使用例では、原点復帰・JOG運転・1速絶対位置決め動作を行います。●位置決めは、FX3Uの1速絶対位置決め命令を使用して、位置を指定します。位置指令は、オープンコレクタ方式のパルス列(符号+パルス列)を出力します。●バイアス速度・最高速度・加減速時間・原点復帰速度・クリープ速度・位置決め出力パルス数・出力パルス周波数を、FX3Uのデータレジスタに指定します。800
 | <
| <  |
|  > |
> |  >>
>>